filters.poisson
The Poisson Filter passes data Mischa Kazhdan’s poisson surface reconstruction algorithm. [Kazhdan2006] It creates a watertight surface from the original point set by creating an entirely new point set representing the imputed isosurface. The algorithm requires normal vectors to each point in order to run. If the x, y and z normal dimensions are present in the input point set, they will be used by the algorithm. If they don’t exist, the poisson filter will invoke the PDAL normal filter to create them before running.
The poisson algorithm will usually create a larger output point set than the input point set. Because the algorithm constructs new points, data associated with the original points set will be lost, as the algorithm has limited ability to impute associated data. However, if color dimensions (red, green and blue) are present in the input, colors will be reconstructed in the output point set. This filter will also run the normal filter on the output point set.
This integration of the algorithm with PDAL only supports a limited set of the options available to the implementation. If you need support for further options, please let us know.
Example
[
"dense.las",
{
"type":"filters.poisson"
},
{
"type":"writers.ply",
"faces":true,
"filename":"isosurface.ply"
}
]
Note
The algorithm is slow. On a reasonable desktop machine, the surface reconstruction shown below took about 15 minutes.
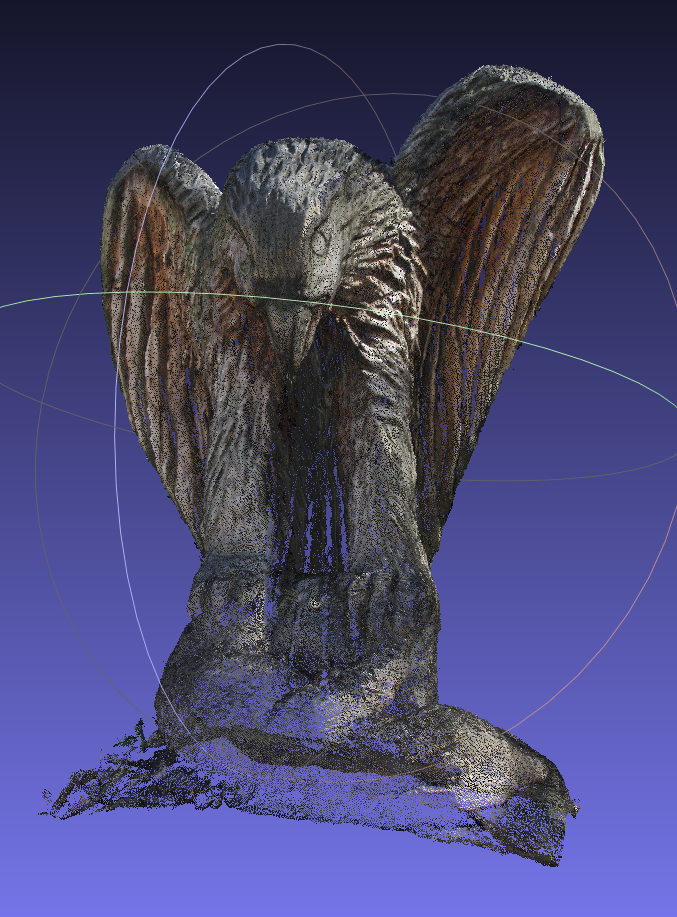
Point cloud (800,000 points)
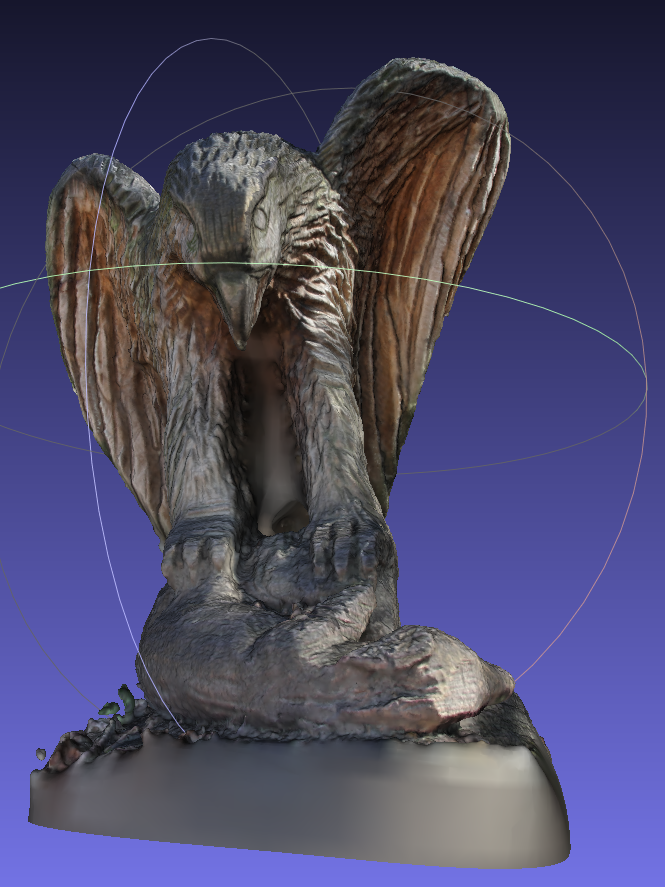
Reconstruction (1.8 million vertices, 3.7 million faces)
Options
- density
Write an estimate of neighborhood density for each point in the output set.
- depth
Maximum depth of the tree used for reconstruction. The output is sensitive to this parameter. Increase if the results appear unsatisfactory. [Default: 8]
- where
An expression that limits points passed to a filter. Points that don’t pass the expression skip the stage but are available to subsequent stages in a pipeline. [Default: no filtering]
- where_merge
A strategy for merging points skipped by a ‘where’ option when running in standard mode. If
true, the skipped points are added to the first point view returned by the skipped filter. Iffalse, skipped points are placed in their own point view. Ifauto, skipped points are merged into the returned point view provided that only one point view is returned and it has the same point count as it did when the filter was run. [Default:auto]