filters.chipper
The Chipper Filter takes a single large point cloud and converts it into a set of smaller clouds, or chips. The chips are all spatially contiguous and non-overlapping, so the result is an irregular tiling of the input data.
Note
Each chip will have approximately, but not exactly, the capacity point count specified.
See also
The PDAL split command utilizes the filters.chipper to split data by capacity.
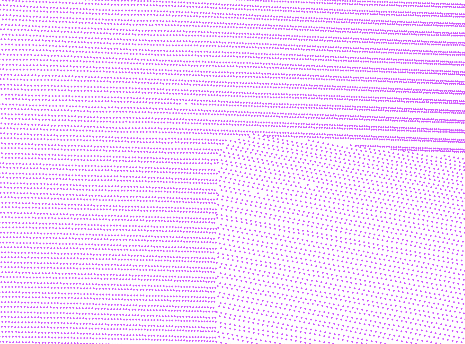
Before chipping, the points are all in one collection.
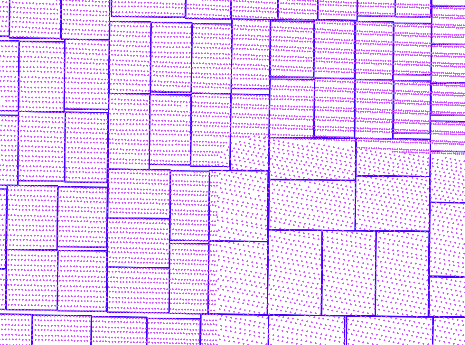
After chipping, the points are tiled into smaller contiguous chips.
Chipping is usually applied to data read from files (which produce one large stream of points) before the points are written to a database (which prefer data segmented into smaller blocks).
Example
[
"example.las",
{
"type":"filters.chipper",
"capacity":"400"
},
{
"type":"writers.pgpointcloud",
"connection":"dbname='lidar' user='user'"
}
]
Options
- capacity
How many points to fit into each chip. The number of points in each chip will not exceed this value, and will sometimes be less than it. [Default: 5000]
- where
An expression that limits points passed to a filter. Points that don’t pass the expression skip the stage but are available to subsequent stages in a pipeline. [Default: no filtering]
- where_merge
A strategy for merging points skipped by a ‘where’ option when running in standard mode. If
true, the skipped points are added to the first point view returned by the skipped filter. Iffalse, skipped points are placed in their own point view. Ifauto, skipped points are merged into the returned point view provided that only one point view is returned and it has the same point count as it did when the filter was run. [Default:auto]