filters.outlier
The outlier filter provides two outlier filtering methods: radius and statistical. These two approaches are discussed in further detail below.
It is worth noting that both filtering methods simply apply a classification value of 7 to the noise points (per the LAS specification). To remove the noise points altogether, users can add a range filter to their pipeline, downstream from the outlier filter.
{
"type":"filters.range",
"limits":"Classification![7:7]"
}
Statistical Method
The default method for identifying outlier points is the statistical outlier method. This method requires two passes through the input PointView, first to compute a threshold value based on global statistics, and second to identify outliers using the computed threshold.
In the first pass, for each point \(p_i\) in the input PointView, compute the mean distance \(\mu_i\) to each of the \(k\) nearest neighbors (where \(k\) is configurable and specified by mean_k). Then,
A global mean \(\overline{\mu}\) of these mean distances is then computed along with the standard deviation \(\sigma\). From this, the threshold is computed as
where \(m\) is a user-defined multiplier specified by multiplier.
We now iterate over the pre-computed mean distances \(\mu_i\) and compare to computed threshold value. If \(\mu_i\) is greater than the threshold, it is marked as an outlier.
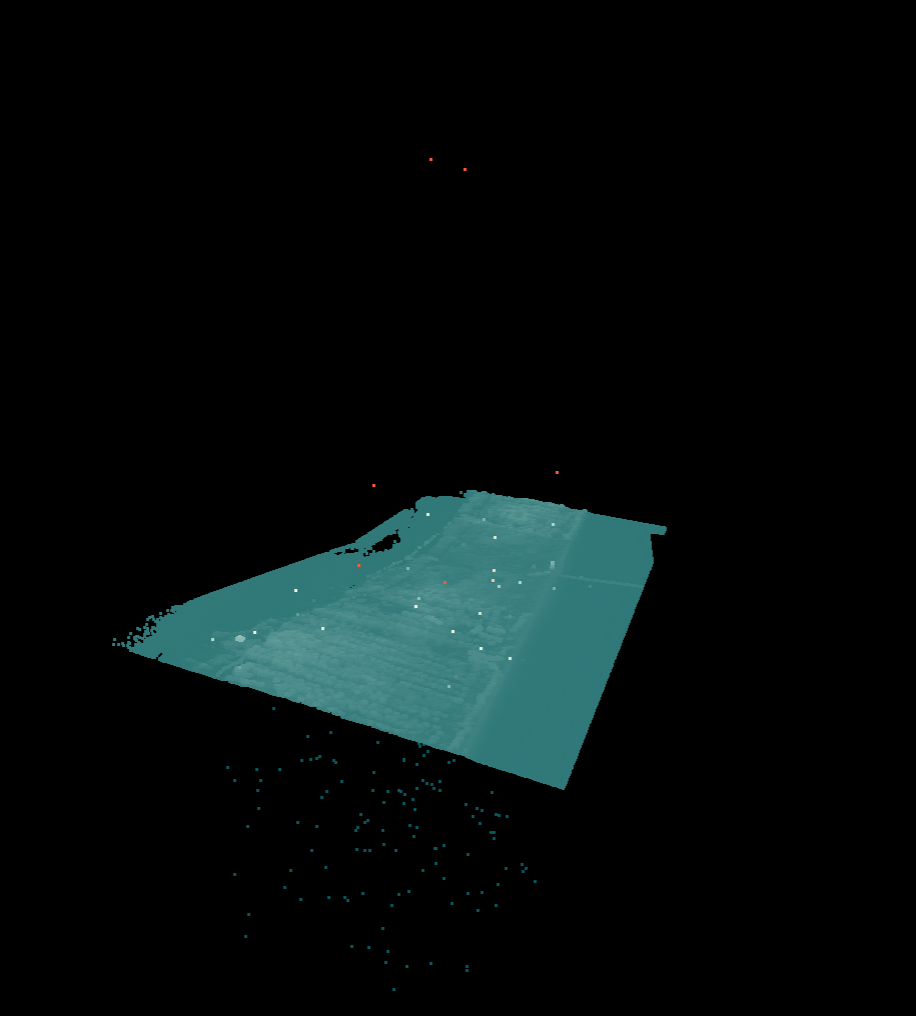
Before outlier removal, noise points can be found both above and below the scene.
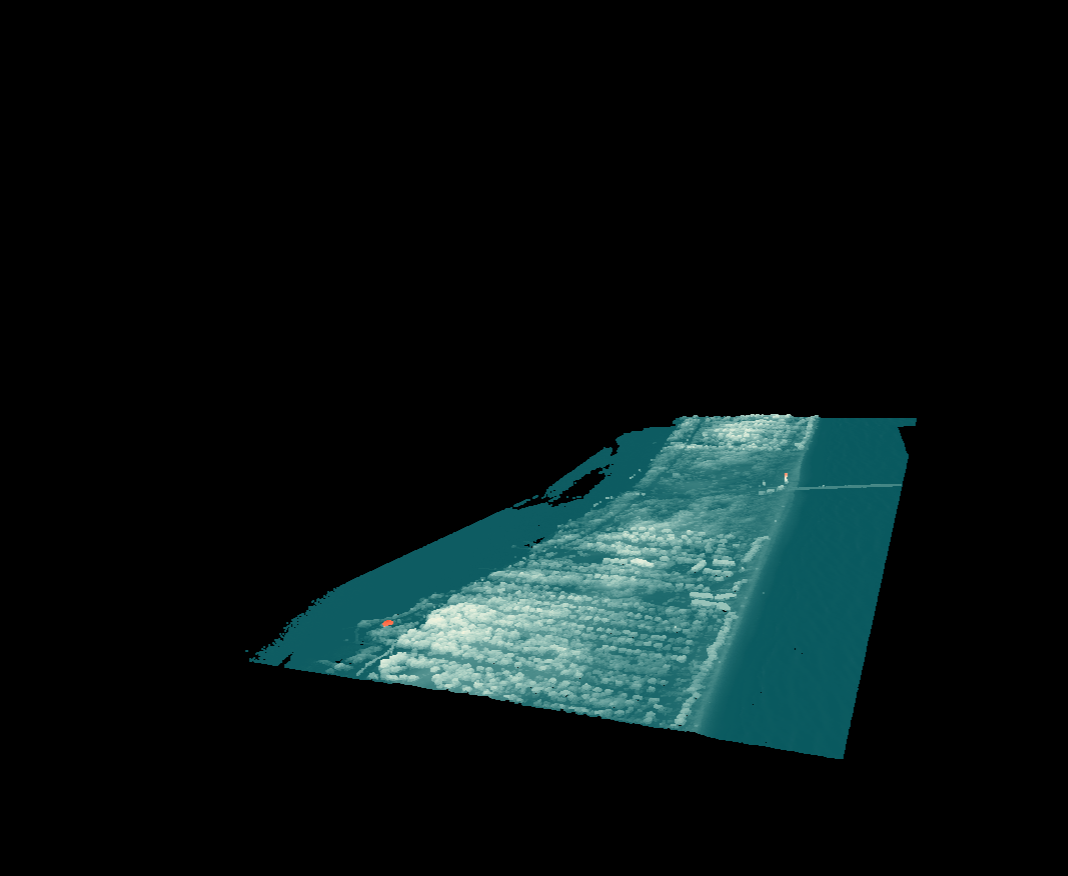
After outlier removal, the noise points are removed.
See [Rusu2008] for more information.
Example
In this example, points are marked as outliers if the average distance to each of the 12 nearest neighbors is below the computed threshold.
[
"input.las",
{
"type":"filters.outlier",
"method":"statistical",
"mean_k":12,
"multiplier":2.2
},
"output.las"
]
Radius Method
For each point \(p_i\) in the input PointView, this method counts the
number of neighboring points \(k_i\) within radius \(r\) (specified by
radius). If \(k_i<k_{min}\), where \(k_{min}\) is the minimum number
of neighbors specified by min_k, it is marked as an outlier.
Example
The following example will mark points as outliers when there are fewer than four neighbors within a radius of 1.0.
[
"input.las",
{
"type":"filters.outlier",
"method":"radius",
"radius":1.0,
"min_k":4
},
"output.las"
]
Options
- class
The classification value to apply to outliers. [Default: 7]
- method
The outlier removal method (either “statistical” or “radius”). [Default: “statistical”]
- min_k
Minimum number of neighbors in radius (radius method only). [Default: 2]
- radius
Radius (radius method only). [Default: 1.0]
- mean_k
Mean number of neighbors (statistical method only). [Default: 8]
- multiplier
Standard deviation threshold (statistical method only). [Default: 2.0]
- where
An expression that limits points passed to a filter. Points that don’t pass the expression skip the stage but are available to subsequent stages in a pipeline. [Default: no filtering]
- where_merge
A strategy for merging points skipped by a ‘where’ option when running in standard mode. If
true, the skipped points are added to the first point view returned by the skipped filter. Iffalse, skipped points are placed in their own point view. Ifauto, skipped points are merged into the returned point view provided that only one point view is returned and it has the same point count as it did when the filter was run. [Default:auto]