Removing noise
This exercise uses PDAL to remove unwanted noise in an airborne LiDAR collection.
Exercise
PDAL provides the outlier filter to apply a statistical filter to data.
Because this operation is somewhat complex, we are going to use a pipeline to define it.
{
"pipeline": [
"./exercises/analysis/denoising/18TWK820985.laz",
{
"type": "filters.outlier",
"method": "statistical",
"multiplier": 3,
"mean_k": 8
},
{
"type": "filters.expression",
"expression": "(Classification != 7) && (Z >= -100 && Z <= 3000)"
},
{
"type": "writers.las",
"compression": "true",
"minor_version": "2",
"dataformat_id": "0",
"filename":"./exercises/analysis/denoising/clean.laz"
},
{
"type": "writers.copc",
"filename": "./exercises/analysis/denoising/clean.copc.laz",
"forward": "all"
}
]
}
Note
This pipeline is available in your workshop materials in the
./exercises/analysis/denoising/denoise.json file.
Pipeline breakdown
1. Reader
After our pipeline errata, the first item we define in the pipeline is the point cloud file we’re going to read.
"./exercises/analysis/denoising/18TWK820985.laz",
2. filters.outlier
The PDAL outlier filter does most of the work for this operation.
{
"type": "filters.outlier",
"method": "statistical",
"multiplier": 3,
"mean_k": 8
},
3. filters.expression
At this point, the outliers have been classified per the LAS specification as
low/noise points with a classification value of 7. The range
filter can remove these noise points by constructing a
range with the value Classification != 7, which passes
every point with a Classification value not equal to 7.
Even with the filters.outlier operation, there is still a cluster of
points with extremely negative Z values. These are some artifact or
mis-computation of processing, and we don’t want these points. We can construct
another range to keep only points that are within the range
\(-100 <= Z <= 3000\).
Both ranges are passed as a AND-separated list to the
expression based range filter via the expression option.
{
"type": "filters.expression",
"expression": "Classification != 7 && (Z >= -100 && Z <= 3000)"
},
4. writers.las
We could just define the clean.laz filename, but we want to
add a few options to have finer control over what is written. These include:
{
"type": "writers.las",
"compression": "true",
"minor_version": "2",
"dataformat_id": "0",
"filename":"./exercises/analysis/denoising/clean.laz"
}
compression: LASzip data is ~6x smaller than ASPRS LAS.minor_version: We want to make sure to output LAS 1.2, which will provide the widest compatibility with other softwares that can consume LAS.dataformat_id: Format 0 supports both time and color information
5. writers.copc
We will then turn the clean.laz file into a COPC file for vizualization with QGIS
using the stage below.
{
"type": "writers.copc",
"filename": "./exercises/analysis/colorization/clean.copc.laz"
"forward": "all"
}
forward: List of header fields to be preserved from LAS input file. In this case, we wantallfields to be preserved.
Note
writers.las and writers.copc provide a number of possible options to control how your LAS files are written.
Execution
Invoke the following command, substituting accordingly, in your ` Shell`:
$ pdal pipeline ./exercises/analysis/denoising/denoise.json
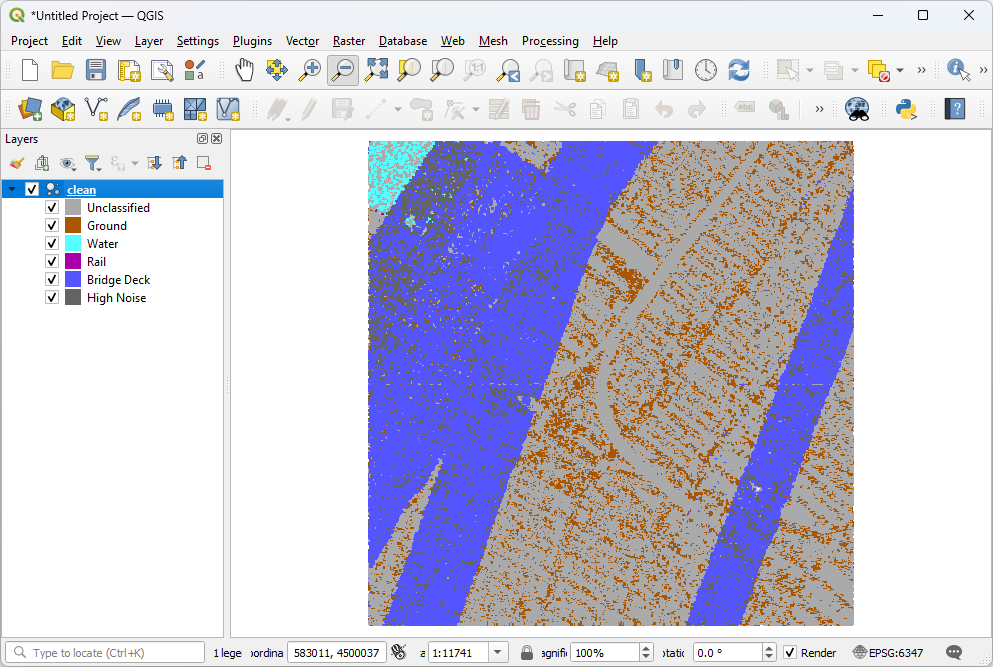
Visualization
Use one of the point cloud visualization tools you installed to take a look at
your clean.copc.laz output. In the example below, we simply
opened the file using QGIS.
Notes
Control the aggressiveness of the algorithm with the
mean_kparameter.filters.outlier requires the entire set in memory to process. If you have really large files, you are going to need to split them in some way.